Voy a enseñar el proyecto que tenía entre manos desde hace tiempo y que he terminado un par de días antes de la publicación de esta entrada. Se trata de una impresora 3D modelo Prusa i3 Steel. No voy a explicar el proceso de montaje y configuración de forma detallada porque se alargaría demasiado y la idea es simplemente mostrar la evolución del montaje de la impresora y comentar alguna posible cosa reseñable del proceso.
Lo primero de todo es montar la estructura de la impresora, que en este caso es completamente de acero, lo que le da mayor estabilidad a la hora de imprimir y un calibrado algo más sencillo. Para el montaje seguí los pasos de esta guía con algunas variaciones.
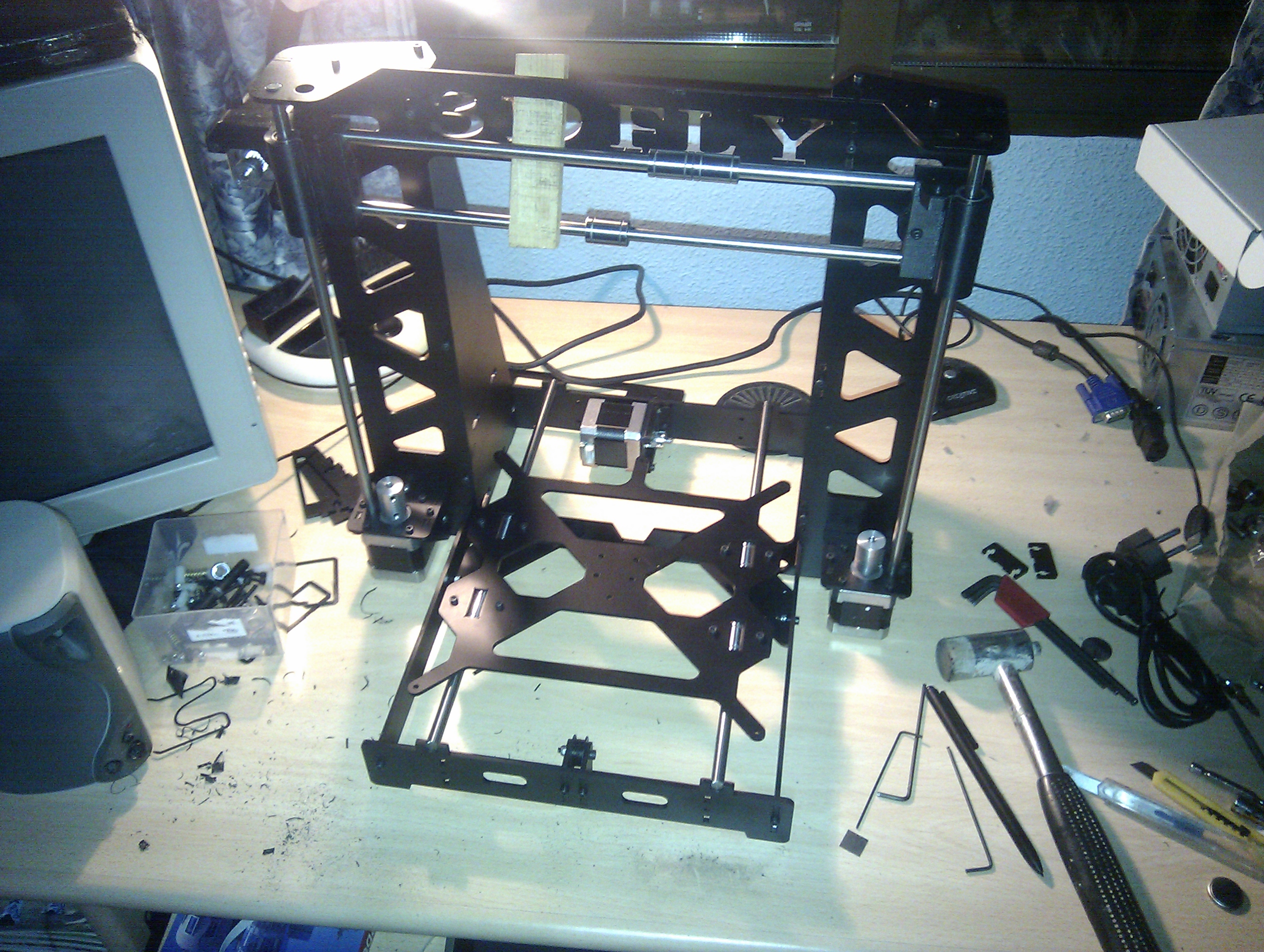
Para empezar, esto es todo lo que traía el kit que compré:

Aquí empiezo con el montaje de la estructura básica y las varillas donde luego irá montada la cama caliente con los rodamientos ya puestos:

Luego va la base de la cama caliente, además del motor y el rodamiento encargados de moverla. También se montan los soportes de los motores del eje Z y se preparan las piezas de plástico donde van los rodamientos del mismo eje y el motor del eje X. La preparación de las piezas de plástico consiste en quitar el sobrante de la base que se crea al imprimir y rebajar la pieza en las zonas que sea necesario para que tengan el tamaño adecuado. Además, estas piezas tienen que llevar unas tuercas incrustadas donde luego irán las varillas roscadas para mover el eje. Para incrustar las tuercas, simplemente las calenté con el soldador hasta que estuvieron en su sitio.

Después se ponen los motores que faltan y se colocan las varillas en su sitio sin olvidar los rodamientos del eje X:
Luego ya se pueden poner las varillas roscadas, las correas y el extrusor previamente ensamblado:

Y con esto la parte del montaje de la estructura ya está terminada, ahora toca la electrónica. Para esta parte, no hay una guía exacta que seguir, ya que dentro del mismo modelo hay distintas variaciones dependiendo de las piezas que se usen por ser un proyecto libre, por lo que tuve que ir recogiendo información de aquí y allá. Para el HotEnd seguí los pasos de esta página y de este vídeo donde en ambos casos explican perfectamente el montaje. Lo demás lo saqué mayormente de Zonamaker, de Spainlabs, de aquí, aquí, aquí, los vídeos del canal de Createc 3D en youtube y otras cuantas páginas y foros que ya ni recuerdo.
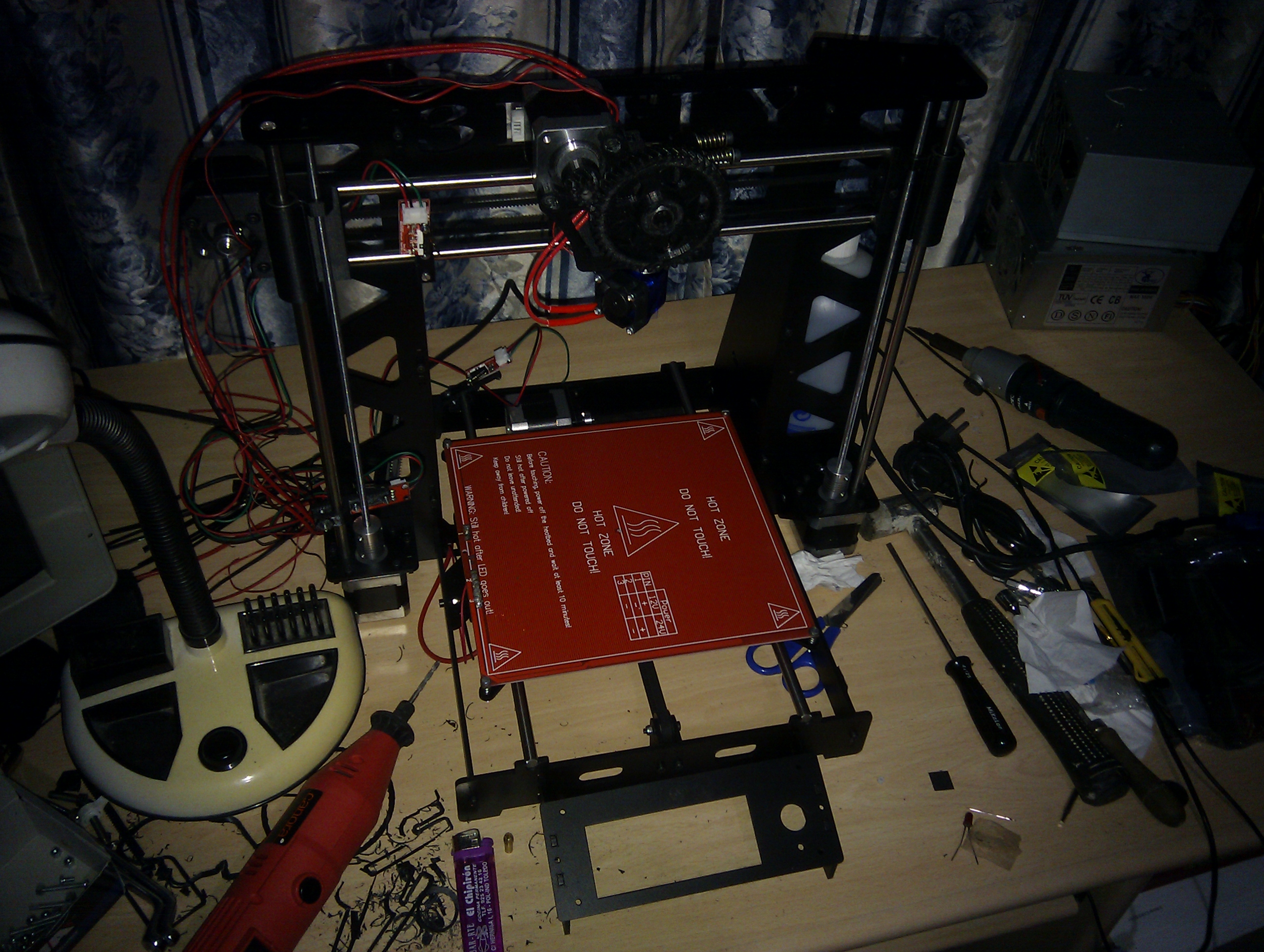
Aquí ya tengo montados el HotEnd, la cama con el termistor y los cables soldados y los finales de carrera puestos provisionalmente:
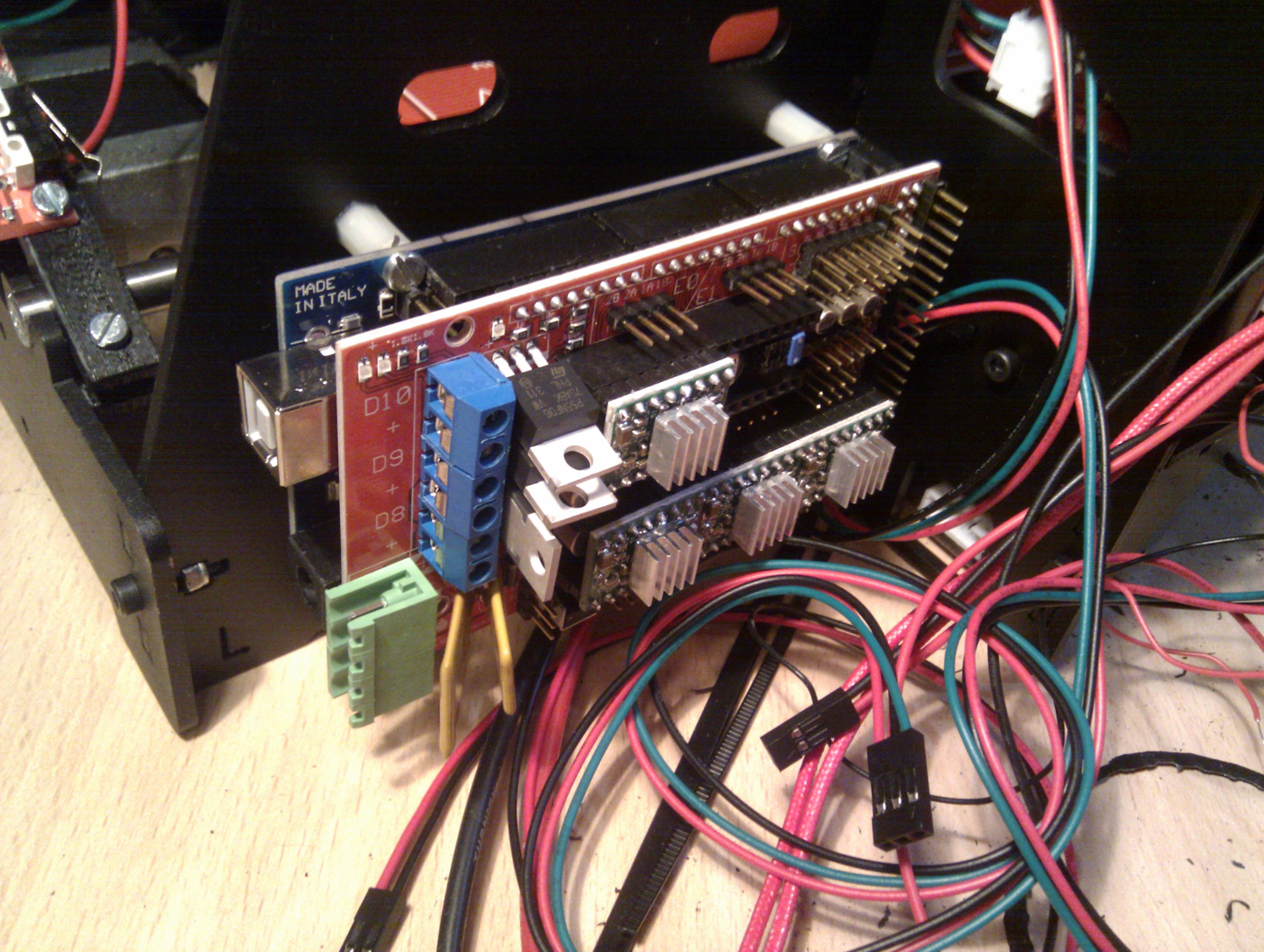
Lo siguiente fue montar las placas de la electrónica. En la siguiente foto se ve el Arduino Mega atornillado a la estructura, con la RAMPS también instalada en el Arduino y los pololus con sus disipadores en la RAMPS junto con los jumpers necesarios en cada eje:
Me faltaba preparar los cables de los motores para conectarlo todo, así que nada, a soldar los cables a los conectores para la RAMPS:

Y a conectarlo todo:
En ese momento no me dí cuenta, pero tenía mal conectados los finales de carrera. Además, cuando quise instalar el LCD, me dí cuenta que las fajas para conectarlo eran demasiado cortas para llegar hasta donde iba a estar instalado, así que me tuve que hacer unas nuevas usando un cable IDE de 40 pines y usando los conectores de las fajas que ya tenía:



Y la fuente de alimentación:
Vale, ahora sí, con todo instalado y conectado, hay que calibrar los pololus para que se puedan mover los motores. Para ello, hay que cargar un firmware al Arduino, en este caso se carga el Sprinter, que hay que cargar a través de una versión antigua del entorno de programación de Arduino, la 0022. Se carga este firmware porque no impide que se muevan los motores si la temperatura no es adecuada. Se hacen las modificaciones necesarias en el firmware y se carga en el arduino. También hace falta el Pronterface para conectar con el Arduino y poder mover los motores. Con esto ya se pueden ajustar los pololus a través del potenciómetro que llevan. Para hacer esto, en todas las páginas ví que recomendaban usar un atornillador cerámico para no hacer ningún cortocircuito. Como yo no tenía, simplemente rodeé la punta de un atornillador de relojero con celofán y listo (no habría hecho ni falta, porque con un poco de cuidado con no tocar donde no se debe, no hay problema). Hay que darle potencia a los pololus hasta que los motores se muevan con soltura, pero sin pasarse.
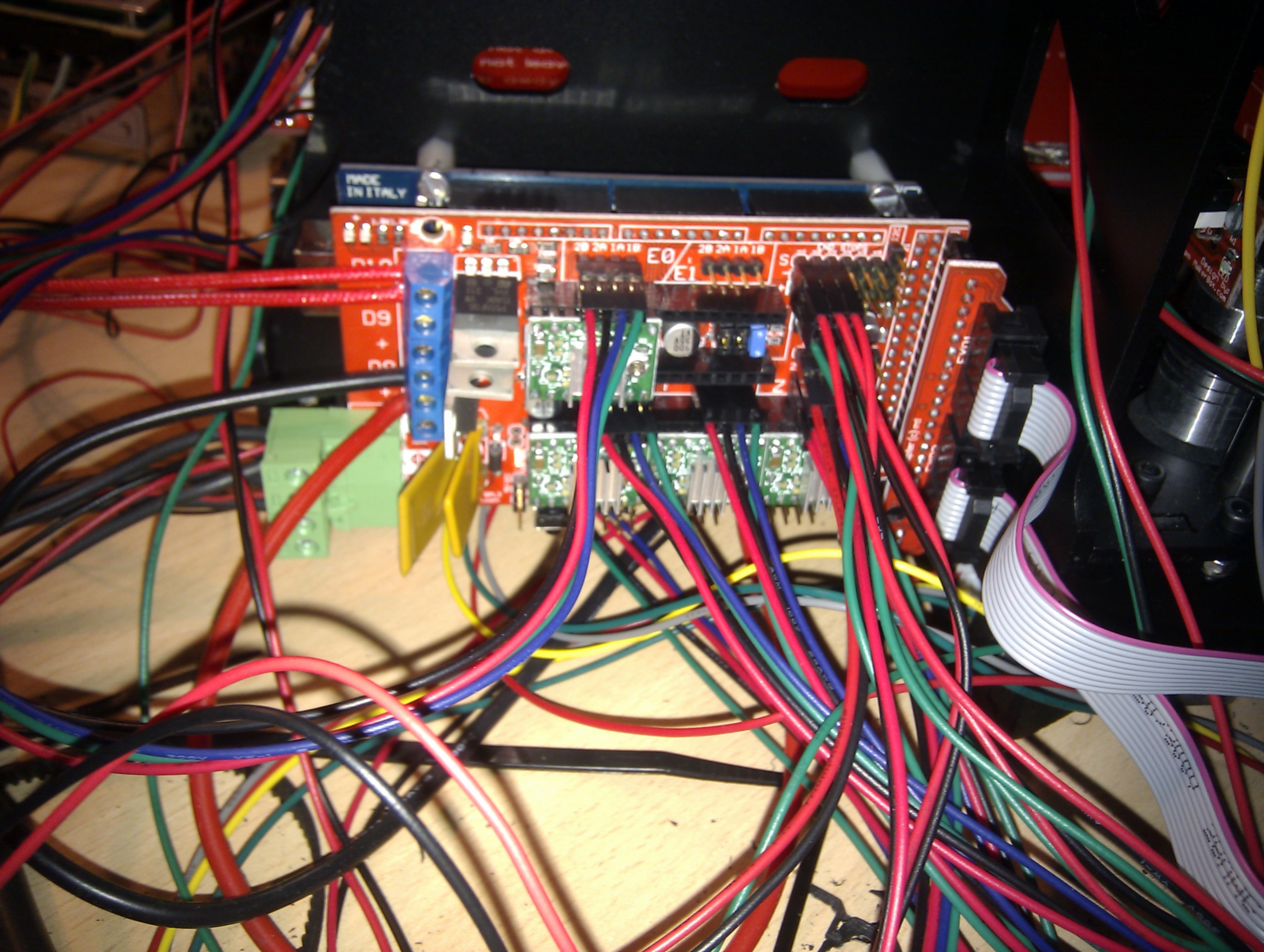
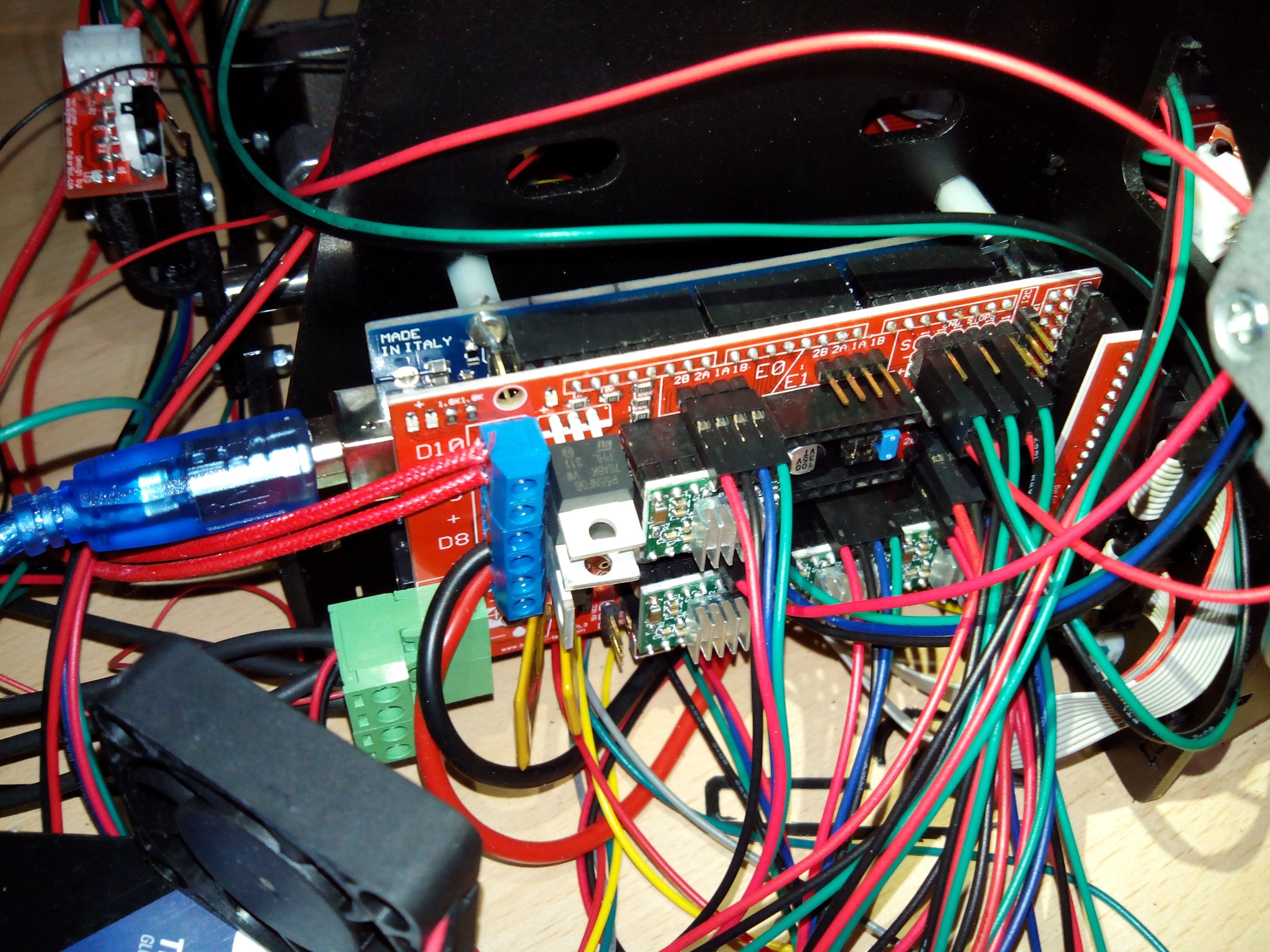
Hecho esto, ya se puede empezar a configurar el firmware definitivo (Marlin) a través de la última versión del entorno de programación. Primero es recomendable comprobar que los finales de carrera funcionan correctamente, y aquí fue cuando me dí cuenta de que los míos estaban mal conectados, porque al pulsar el del eje X, lo que pasó fue que se apagó la electrónica. El problema: que había puesto los conectores en sentido contrario. Pero aún habíendolos colocado en el sentido correcto, seguía habiendo un problema: el del eje X iba bien, el del eje Y no funcionaba y el del eje Z funcionaba cuando debería hacerlo el del eje Y. La cosa estaba en que en los turoriales que había visto, la RAMPS tenía dos pines para los finales de carrera en tres pares de pines, mientras que la mía tenía seis grupos de tres pines cada uno. Y es que esta versión de RAMPS trae para conectar finales de carrera al principio del recorrido de cada eje, pero también para el final del recorrido, además de un tercer pin para el LED de los finales de carrera que se enciende al estar pulsado el interruptor. En la siguiente foto se pueden ver las conexiones ya corregidas:
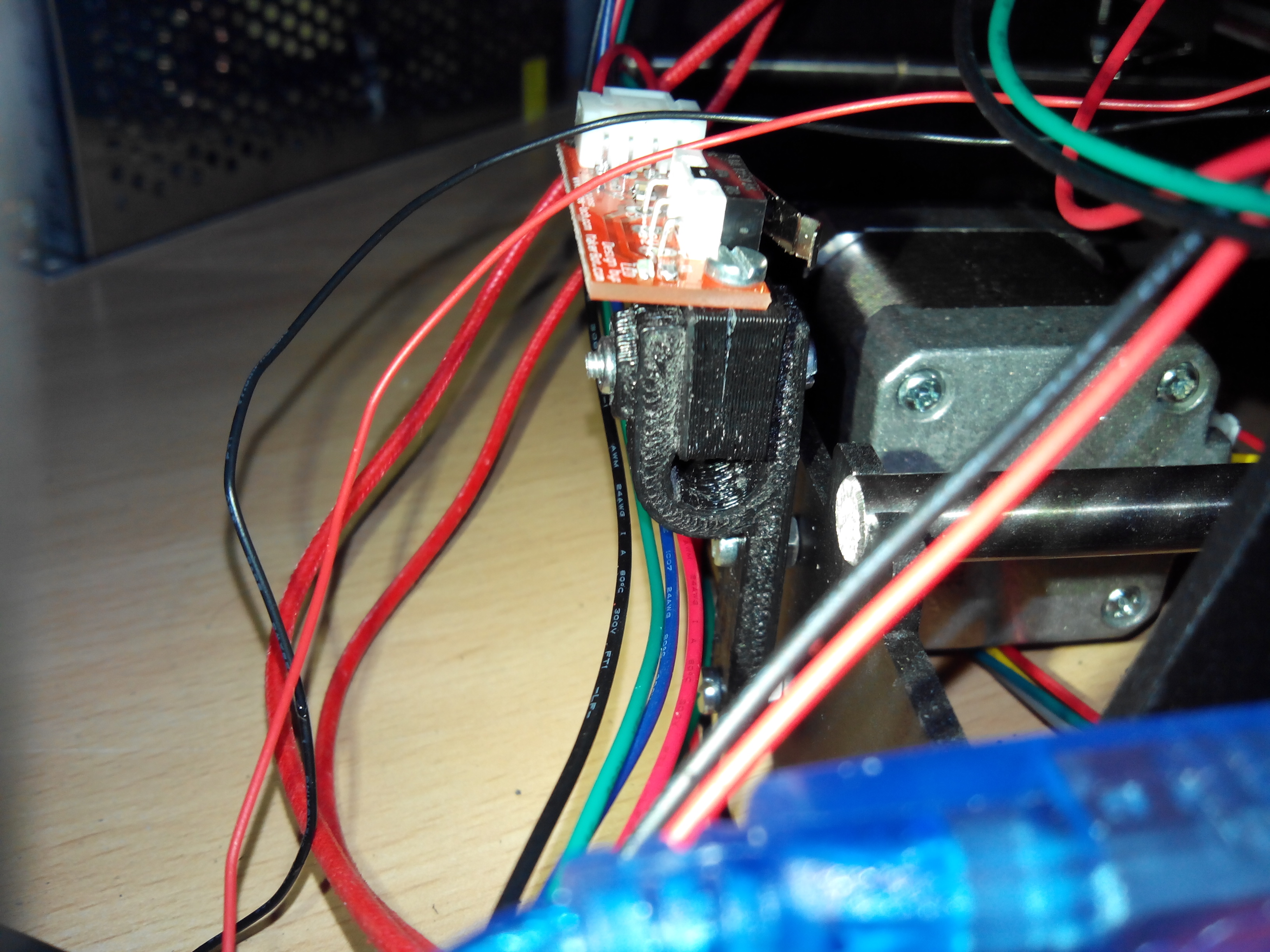
Además, con los soportes que venían para los finales de carrera, no había problema para colocar los de los ejes X y Z, pero para el Y, tuve que hacer un apaño:
Comprobado ya que todo funciona, sólo hay que colocar el espejo en la cama caliente, terminar de calibrar la impresora (altura de la cama, del eje Z y posición de los finales de carrera) y de configurar el Marlin (calibrado del desplazamiento de los ejes, de la cantidad de filamento extruído, que los motores vayan en el sentido correcto, área de impresión, activación del LCD, configuración del PID (que se obtiene con el comando m303 en Pronterface), temperatura mínima, etc). Éste es mi firmware ya configurado.
Y por fin, se puede hacer la primera prueba de impresión imprimiendo un cubo de calibración con el que luego comprobaremos que tiene las medidas correspondientes. He de decir que mi primer intento salió mal por no tener la cama bien calibrada y no haber usado laca (el filamento no se pegó a la cama por lo que el HotEnd se llevaba por delante el filamento ya extruído). Además, a simple vista pude ver que el filamento no salía de forma constante por falta de presión por parte del tornillo del extrusor, aunque en anteriores pruebas de extrusión no me había dado problemas. Solucionados estos problemas, otro intento que ahora sí, salió bien.
La calidad de impresión fue bastante buena y las medidas eran perfectas. Lo siguiente, imprimir un soporte para el ventilador de la RAMPS y ordenar un poco el cableado. Supongo que con el tiempo también le haré una carcasa para mantener la temperatura de impresión estable y evitar el polvo en las piezas.
Aquí una foto de los cables algo más ordenados y el ventilador instalado:

Y la impresora ya terminada:

Y así, de forma muy resumida, es como he montado mi primera impresora 3D.
<< Volver a la página principal >>

